Design and Improvement of a Delta Robot 3D Printer
UG Faculty Mentored Grant SP 2022
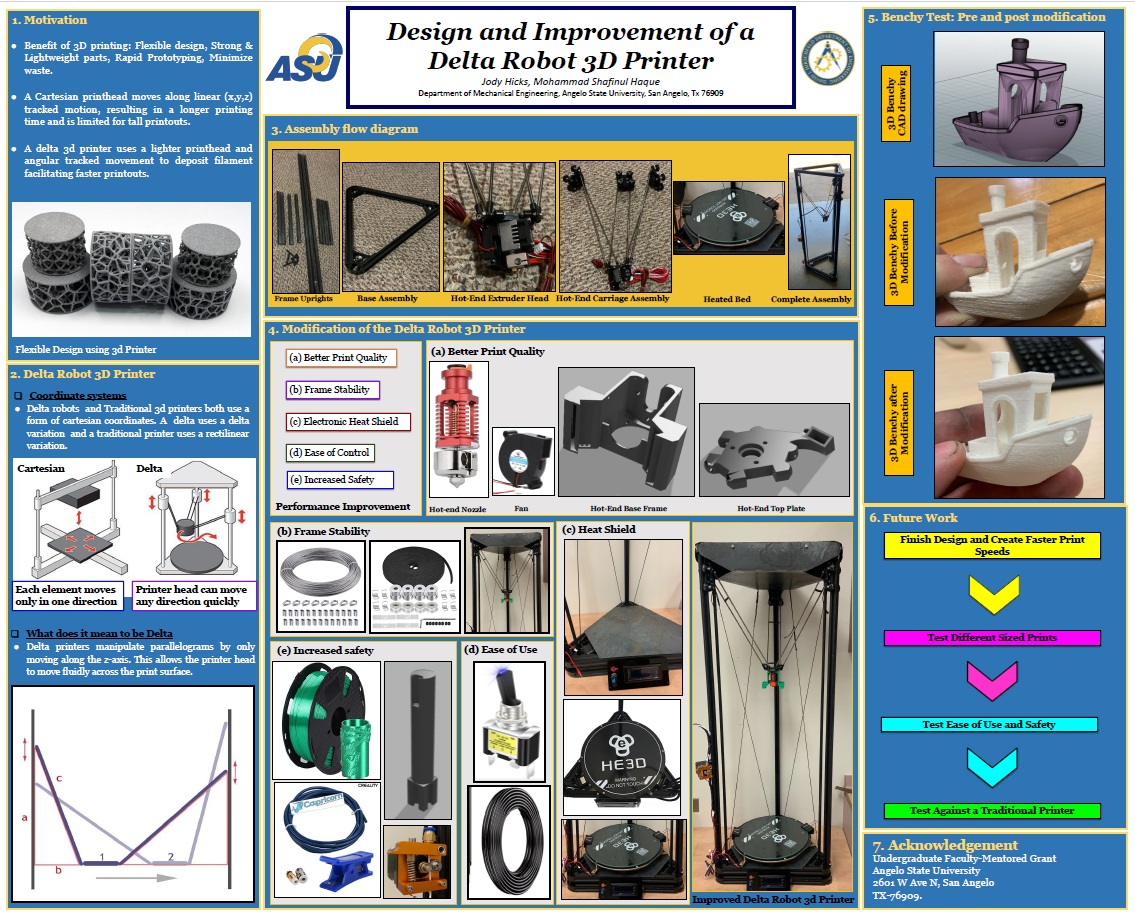
Abstract: Traditional 3d printers use Cartesian coordinate systems and can print with good quality printing. A Cartesian printhead moves along linear (x,y,z) tracked motion, resulting in a longer printing time, and is limited for tall printouts. The objective of this project is to design and build a 3d printer that can print faster than the Cartesian printers, enable tall printouts, and still have good quality prints. This is achievable through a delta robot 3d printer design. A delta 3d printer uses a lighter printhead and angular tracked movement to deposit filament, facilitating faster printouts. A comparison of this is a Cartesian printer works like an “Etch A Sketch,” and a delta printer is more like moving a pencil on a piece of paper. For example, it is faster to draw an intricate picture by hand (delta) than it is one step at a time (cartesian). This improved delta printer will be the first of its kind in the ASU engineering laboratory, will let students build complex objects rapidly for projects, and facilitate 3d printer control mechanism study.
- Funding: ASU UG Faculty-Mentored Grant
- Collaborator:
- Student: Jody Hicks
- Award Amount: $2500
- Duration: SP 2022
Project Images

Poster
 </p
</p